
视频加载中...
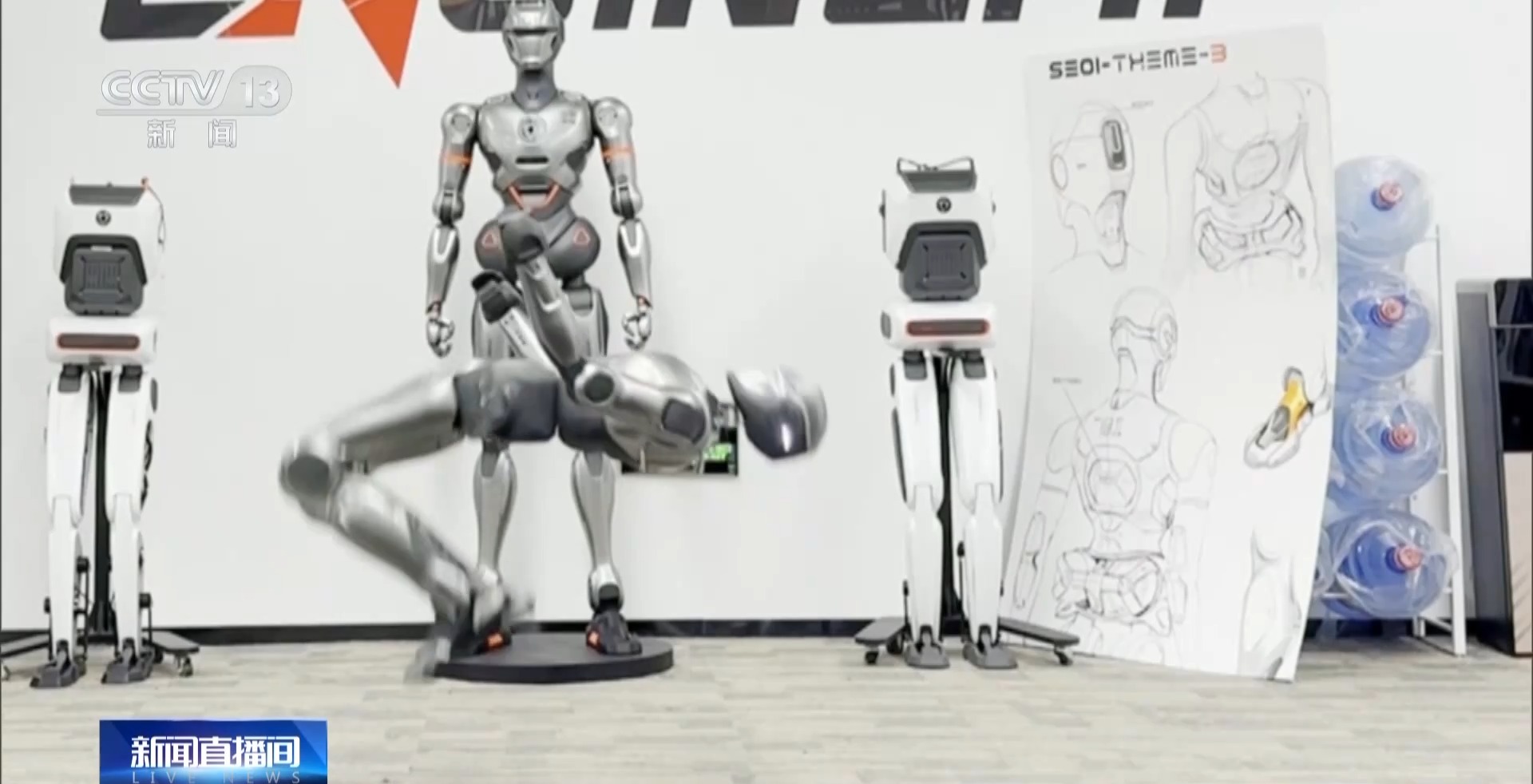
随着人工智能、传感器技术等的快速发展,人形机器人的研究取得显著进展,已经可以完成行走、奔跑等动作。近日,深圳的一家机器人公司研制的人形机器人,则完成了难度更大的动作:前空翻。
机器人的这个前空翻动作,完成得干净利落。

再来一次,落地后,机器人还能前行两步,调节身体的稳定性,这对于机器人来说则是更高的要求。那么,机器人是如何完成这一动作的呢?
科研人员告诉记者,要完成前空翻的动作,控制机器人的重量和机器人全身关节的爆发力非常重要。
深圳市某机器人科技有限公司联合创始人 李海雷:在机器人行业,整机的重量是对整机性能影响最重要的一个参数。你只有把整机重量做得轻了,同时关节爆发力做得更高,才能完成这种极限的动作。
能完成前空翻动作,展示了机器人在运动控制、平稳能力和机械设计方面的高度复杂性,也需要更加复杂的算法支撑。

深圳市某机器人科技有限公司联合创始人 李海雷:我们得益于所有的关节都有自研的能力,这样在整机上我们能把整机的重量控到极致,你只有把类似推重比做到极致,才能带动更高的机器人运动性能。

凭着自主研发的硬实力,公司科研人员先是用了4个月的时间,改变了人形机器人长期以来只能以弯腿屈膝小碎步行走的形态,让人形机器人能够以优雅直膝的步态行走。然后只用了半个月的时间,他们就让机器人拥有了前空翻的能力。
下一步,科研人员还将在提升机器人的奔跑速度和跳跃能力等方面继续发力。

深圳市某机器人科技有限公司总裁 赵同阳:体能今年我们就要把它做到极致,再把智能在今年下半年开始逐渐去加入,当体能和智能都能进行突破的时候,机器人应用就会非常广。

当前,深圳机器人产业已崭露头角,全市已汇聚人工智能企业2600余家、独角兽企业6家,机器人上市企业34家、独角兽企业9家,创新活力持续迸发。
来源:央视新闻
- 随机文章
- 热门文章
- 热评文章
- 盘龙:优化招商引资营商环境提升企业服务质量
- 这些股票,被大幅加仓
- ACSNano丨西湖大学程建军等团队合作研究解读聚乙二醇化脂质纳
- 任前公示朱百里拟提正厅,曾任华安县委书记!
- 露营推车变身遛娃神器
- 山野茶语
- 江西九江:武宁山茶花竞相绽放游人踏青赏花纷至沓来今日头
- 玫瑰花开醉心头
转载请注明来自知行看点,本文标题:《人形机器人做前空翻难在哪?》












 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号